
[ad_1]
Scientists have been attempting to construct snakelike, limbless robots for many years. These robots might turn out to be useful in search-and-rescue conditions, the place they might navigate collapsed buildings to search out and help survivors.
With slender, versatile our bodies, limbless robots might readily transfer by means of confined and cluttered areas comparable to particles fields, the place strolling or wheeled robots and human rescuers are likely to fail.
Nonetheless, even essentially the most superior limbless robots haven’t come near shifting with the agility and flexibility of worms and snakes in troublesome terrain. Even the tiny nematode worm Caenorhabditis elegans, which has a comparatively easy nervous techniques, can navigate by means of troublesome bodily environments.
As a part of a workforce of roboticists and physicists, we needed to discover this discrepancy in efficiency. However as an alternative of trying to neuroscience for a solution, we turned to biomechanics.
We got down to construct a robotic mannequin that drove its physique utilizing a mechanism just like how worms and snakes energy their motion.
Undulators and mechanical intelligence
Over hundreds of years, organisms have advanced intricate nervous systems that permit them to sense their bodily environment, course of this info and execute exact physique actions to navigate round obstacles.
In robotics, engineers design algorithms that absorb info from sensors on the robotic’s physique – a sort of robotic nervous system – and use that info to resolve easy methods to transfer. These algorithms and techniques are normally advanced.
Our workforce needed to determine a solution to simplify these techniques by highlighting mechanically managed approaches to coping with obstacles that don’t require sensors or computation. To do this, we turned to examples from biology.
Animals don’t rely solely on their neurons – mind cells and peripheral nerves – to regulate motion. Additionally they use the bodily properties of their physique – for instance, the elasticity of their muscle mass – to assist them react to their surroundings spontaneously, earlier than their neurons also have a probability to reply.
Whereas computational techniques are ruled by the laws of mathematics, mechanical techniques are ruled by physics. To realize the identical job, scientists can both design an algorithm or rigorously design a bodily system.
For instance, limbless robots and animals transfer by means of the world by bending sections of their physique left and proper, a type of movement called undulation. In the event that they collide with an impediment, they’ve to show away and go round it by bending extra to at least one facet than the opposite.
Scientists might obtain this with a robotic by attaching sensors to its head or physique. They might then design an algorithm that tells the robotic to show away or wind across the impediment when it “feels” a big sufficient drive on its head or physique.
Alternatively, scientists might rigorously choose the robotic’s supplies and the association and energy of its motors in order that collisions would spontaneously produce a physique form that led to a flip. This robotic would have what scientists name “mechanical intelligence.”
If scientists like us can perceive how organisms’ our bodies reply mechanically to contact with objects of their surroundings, we will design higher robots that may cope with obstacles with out having to program advanced algorithms.
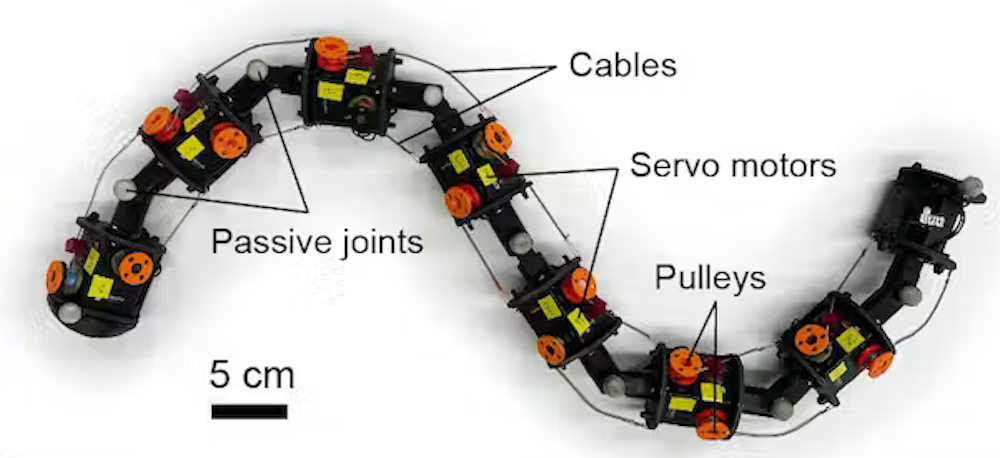
When you examine a various set of undulating organisms with the more and more massive zoo of robotic “snakes,” one distinction between the robots and organic undulators stands out. Almost all undulatory robots bend their our bodies utilizing a sequence of related segments with motors at every joint. However that’s not how dwelling organisms bend.
In distinction, all limbless organisms, from massive snakes to the lowly, microscopic nematode, obtain bends not from a single rotational joint-motor system however as an alternative by means of two bands of muscles on both facet of the physique. To an engineer, this design appears counterintuitive. Why management one thing with two muscle mass or motors when one might do the job?
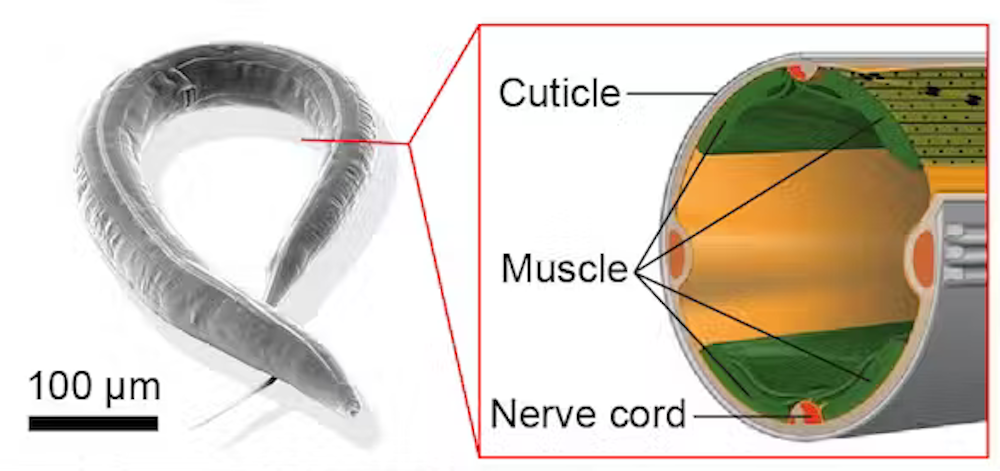
Ralf J. Sommer and WormAtlas
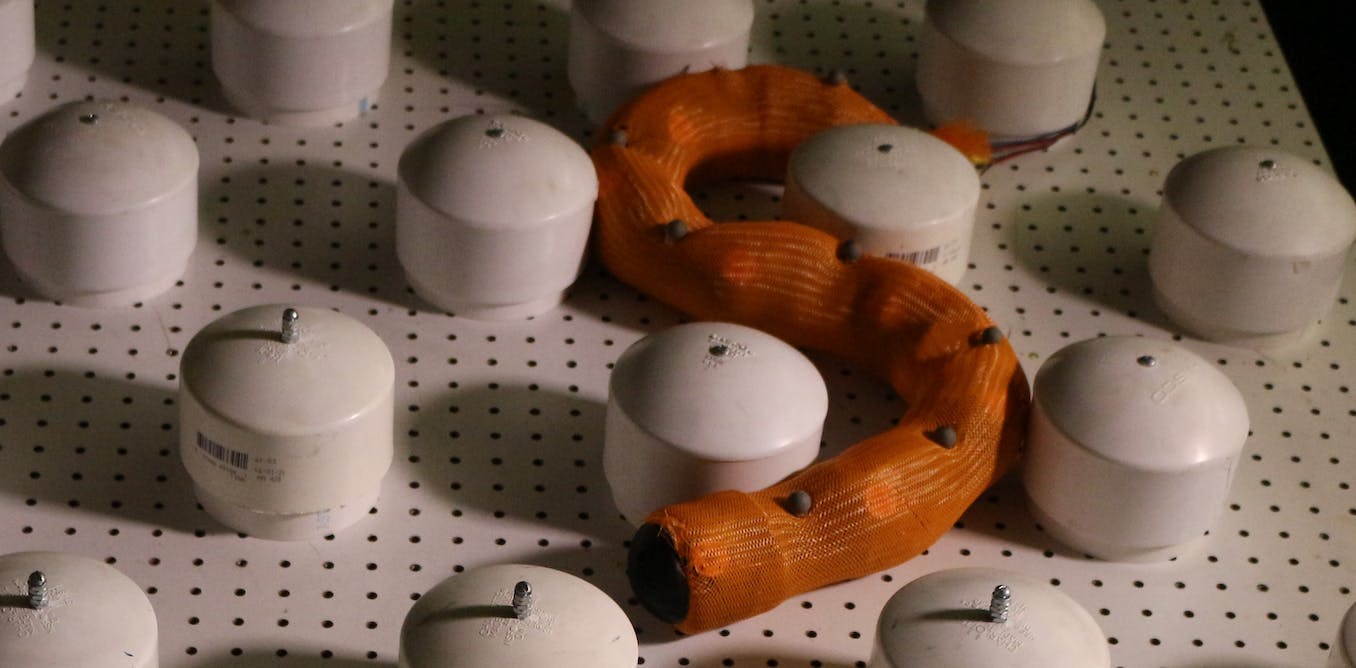
To unravel this query, our workforce constructed a brand new robotic referred to as MILLR, for mechanically clever limbless robotic, impressed by the 2 bands of muscle on snakes and worms. MILLR has two independently managed cables that pull every joint left and proper, bilaterally.
Tianyu Wang
We found this methodology permits the robotic to spontaneously transfer round obstacles with out having to sense its environment and actively change its physique posture to conform to the surroundings.
Constructing a mechanically clever robotic
Somewhat than mimicking the detailed muscular anatomy of a specific organism, MILLR applies forces to both facet of the physique by spooling and unspooling a cable.
This manner, it mirrors the muscle activation strategies that snakes and nematodes use, the place the left and proper sides take turns activating. This activation mode pulls the physique towards one facet or one other by tightening on one facet, whereas the opposite facet relaxes and is pulled alongside passively.
Tianyu Wang and Christopher Pierce
By altering the quantity of slack within the cables, we can achieve various levels of physique stiffness. When the robotic collides with an impediment, relying on the cable pressure, it selectively maintains its form or bends underneath the drive of the impediment.
We found that if the robotic was actively bending to at least one facet and it skilled a drive in the identical course, the physique complied to the drive and bent additional. If, alternatively, the robotic skilled a drive that opposed the bend, it could stay inflexible and push itself off the impediment.
Due to the sample of the stress alongside the physique, head-on collisions that may usually trigger the robotic to cease shifting or jam itself as an alternative naturally led to a redirection across the impediment. The robotic might push itself ahead constantly.
Testing MILLR
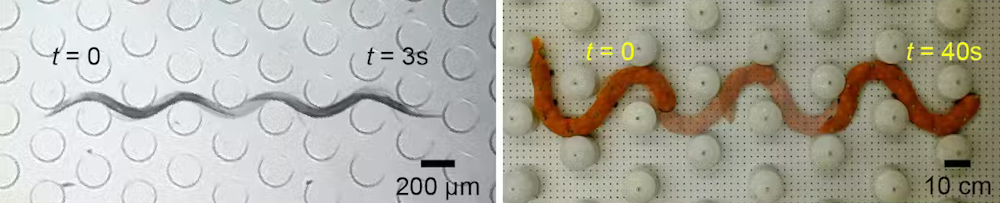
To analyze the advantages of mechanical intelligence, we constructed tiny impediment programs and despatched nematode worms by means of them to see how nicely they carried out. We despatched MILLR by means of an analogous course and in contrast the outcomes.
MILLR moved by means of its course about as effectively as the real worms. We observed that the worms made the identical kind of physique actions after they collided with obstacles as MILLR did.
The rules of mechanical intelligence might prolong past the realm of nematodes. Future analysis might have a look at designing robots primarily based on a bunch of different varieties of organisms for functions starting from search and rescue to exploring other planets.
[ad_2]
Source link